All aboard, fungal spore traps take flight
Following on from the flying spore traps article in our June 2009 edition of The Leaflet, Professor Rodney Walker from Queensland University of Technology (QUT) and Director of the Australian Research Centre for Aerospace Automation (ARCAA) is leading the scoping study to determine the potential of using an unmanned aerial vehicle (UAV), fitted with a spore trap, to detect and monitor spores of plant pathogens.
Rod’s expertises in aerospace avionics engineering are also complemented by the skills of Dr Felipe Gonzalez who is the primary investigator for this research. Felipe’s expertise is in multidisciplinary design optimisation (MDO) of Aerospace Engineering systems. He is also a lecturer at QUT and ARCAA.
The problem with existing spore sampling devices is that they are stationary at the sampling location. It is important to have the correct sampling location, however due to prevailing climatic conditions where topography is severe is almost impossible to do this. When the disease is in the canopy of trees, using existing spore sampling technologies is also near impossible.
The first step for the project team was to use the exiting prototype spore trap developed by Les Zeller and modify it for the purpose of wind tunnel and flight testing onboard the unmanned aerial vehicle (UAV).
A wind tunnel test was conducted to address two issues:
- detecting spores with known probability of detection, and
- understanding the probability of false alarms.
Results from the wind tunnel tests allowed for the calculation of the spread of spores captured on the tape.
The spore trap was then integrated to the UAV and onboard auto pilot systems. The UAV was flown autonomously and the tape index was programmed to shift to a predefined sampling location once the desired waypoint was reached. The flight test displayed that the flamingo UAV could be flown autonomously without exhibiting any flight stability issues while the spore trap was onboard. Furthermore, the onboard tape indexing system was validated to function remotely where the index position could be verified via the Horizon ground station graphical user interface.

Figure 1: Spore trap onboard UAVduring autonomous flight
From this research, the team developed a sampling system that has the ability to spatially monitor fungal spores, as well as defining protocols to interpret their spatial distribution. This breakthrough has greatly enhanced the ability to detect new incursions of fungal pathogens and to enable more accurate setting of boundaries of distribution.
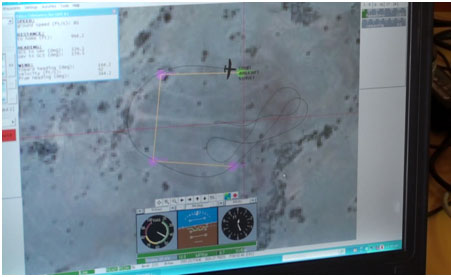
Figure 2: Image shows UAV path, sampling points in blue and new index location in green top right
This technology will allow for earlier detection of plant disease incursions in difficult areas and provide efficient and effective airborne surveillance.
The design and testing of this device has and continues to be a complex multidisciplinary task involving different disciplines, aerodynamics, structural biological sampling, flight control, and avionics.
Further research will be conducted to refine the flying spore trap for use by plant health surveillance staff employed by state and federal agencies.
Figure 3: Geo-Referencing Captured Samples
Images supplied by: Dr Felipe Gonzalez. Learn more about Felipe here.